新的坐标系使研究人员能够比较小鸡和青蛙的四肢发育情况
为了阐明跨物种组织动力学的原理,RIKEN 生物学家开发了一种分析脊椎动物肢体发育的新方法。这些原则可以帮助指导称为类器官的人造器官的开发。该研究发表在《自然通讯》杂志上。
1917 年,苏格兰生物学家达西·温特沃斯·汤普森 (D'Arcy Wentworth Thompson) 爵士在其具有里程碑意义的著作《论生长与形态》中表明,密切相关的物种之间动物形状的差异可以通过简单的几何变换来描述,这表明它们背后存在标准形状。然而,一个多世纪后,人们对不同物种在发育过程中塑造身体和身体部位的数学原理知之甚少。
在之前研究小鸡四肢发育的研究的基础上,RIKEN 生物系统动力学研究中心的 Yoshihiro Morishita 和他的同事们现在试图确定组织随空间和时间的变化模式(即物理形态发生过程)是否也发生变化。不同物种之间具有共同的动态。
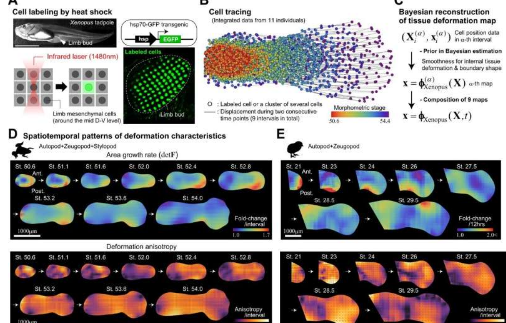
他们提出了一个时空坐标系,可以直接比较大小、形状和发育时间尺度不同的物种之间的组织动力学。研究人员将其应用于小鸡和青蛙肢体发育的早期阶段,发现这两个物种之间的组织动力学得到了很好的保存,至少在骨骼模式建立之前是这样。
“所提出的坐标系可以揭示独立于物种的器官特异性设计原理,这将导致对发育生物学的更深入理解,”森下总结道。
通过标记和追踪发育中的肢芽中的细胞,研究小组能够检查组织在空间和时间上的生长和变形模式。他们证明,在所提出的坐标系中,不同物种的模式非常相似,以至于很难区分。
一些典型肢体标记基因的表达动态在两个物种的拟议坐标系中也相似,表明脊椎动物肢体的发育受到物理过程和信号通路的调节,这些物理过程和信号通路在物种间以定量方式得到很好的保守。
“我们的研究结果表明,当形成不同大小和形状的同源器官时,跨物种存在原型动力学,”森下说。
为了确定鸡和青蛙之间保守的组织动力学有多普遍,森下和他的团队现在打算将相同的方法应用于其他器官和一系列物种。
他们还计划比较跨物种的基因表达在时间和空间上的全基因组模式,以发现可能导致物种间器官形态差异的基因。揭示器官形态发生背后的基本设计原则将有助于操纵器官形态,包括生成更好的类器官。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。









