交互式信息物理人生成接触丰富的全身运动
人类自然会执行许多复杂的任务。这些包括坐下,从桌子上拿起东西,推推车。这些活动涉及各种运动,需要多次接触,这使得对机器人进行编程以执行它们变得困难。
最近,东京理科大学的吉田荣一教授提出了一个交互式信息物理人(iCPH)平台的想法来解决这个问题。它可以帮助理解和生成具有丰富接触的全身运动的类似人类的系统。他的工作发表在《机器人与人工智能前沿》上。
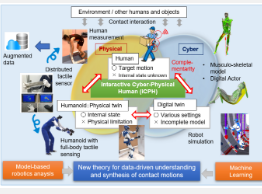
吉田教授简要介绍了该平台的基本原理。“顾名思义,iCPH结合了物理和网络元素来捕捉人体运动。虽然人形机器人充当人类的物理孪生体,但数字孪生体作为网络空间中的模拟人或机器人存在。后者通过肌肉骨骼和机器人分析等技术进行建模。这对双胞胎相辅相成。
这项研究提出了几个关键问题。类人生物如何模仿人类的运动?机器人如何学习和模拟人类行为?机器人如何与人类顺利自然地互动?吉田教授在这个框架中解决了这些问题。首先,在iCPH框架中,通过量化与身体各个部位运动相关的形状,结构,角度,速度和力来测量人体运动。此外,还记录了人类的接触顺序。因此,该框架允许通过微分方程对各种运动进行通用描述,并生成人形机器人可以作用的接触运动网络。
其次,数字孪生通过基于模型和机器学习的方法学习这个网络。它们通过分析梯度计算方法桥接在一起。持续学习教会机器人模拟如何执行接触序列。第三,iCPH通过数据增强丰富接触运动网络,并应用矢量量化技术;它有助于提取表达接触运动语言的符号。因此,该平台允许在无经验的情况下进行接触运动。换句话说,机器人可以通过涉及许多接触的平滑运动来探索未知环境并与人类互动。
实际上,作者提出了三个挑战。这些涉及接触运动的一般描述符、持续学习和符号化。导航它们是实现iCPH的必要条件。一旦开发出来,这个新颖的平台将有许多应用。
“iCPH的数据将被公开并部署到现实生活中的问题,以解决社会和工业问题。人形机器人可以将人类从许多涉及严重负担的任务中解放出来,并提高其安全性,例如举起重物和在危险环境中工作。iCPH还可用于监控人类执行的任务,并帮助预防与工作有关的疾病。最后,人形机器人可以通过数字孪生由人类远程控制,这将使类人机器人能够进行大型设备安装和物体运输,“吉田教授在谈到iCPH的应用时说。
使用iCPH作为零点,并借助不同研究社区的合作,包括机器人,人工智能,神经科学和生物力学,人形机器人的未来并不遥远。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。









